Conditional Adversarial Nets 詳解
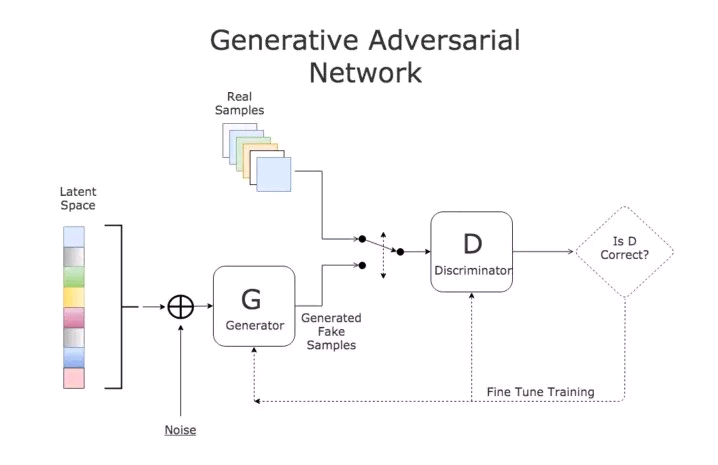
本文提出在利用 GAN(對抗網(wǎng)絡(luò ))的方法時(shí),在生成模型G和判別模型D中都加入條件信息來(lái)引導模型的訓練,并將這種方法應用于跨模態(tài)問(wèn)題,例如圖像自動(dòng)標注等。







![]()
轉載請注明轉載自"浪浪山旁那個(gè)村"
本站圖片部分來(lái)源于網(wǎng)絡(luò )
 提供CDN加速
提供CDN加速